用于三维成像的1064nm单光子激光雷达
撰稿人—孟凡星
研究方向—单光子激光雷达

TITLE
# 用于三维成像的1064nm单光子激光雷达#
NO.1
导读
单光子光探测与测距系统因其在弱回波探测和高分辨率方面的优势,在三维成像领域中得到了广泛的应用。然而,由于设备性能限制和强烈的太阳辐射,远程成像是一个巨大的挑战。在此文章中,作者通过实验演示了一个单光子成像系统,工作波长为1064nm。设计了一种具有二维旋转平台的全光纤系统,实现了宽扫描功能,并且采用亚像素扫描方法提高空间分辨率。图像重建基于迭代收缩阈值算法;在此,噪声阈值自适应于接收到的光子计数分布。从每个像素中提取多范围信息,最终生成三维点云。结果表明,在距离2.13km处,距离分辨率为38cm,空间分辨率约为7.4cm,是光学系统衍射极限的三倍。相关研究成果以A 1064 nmsingle-photon lidar for three-dimensional imaging 为题发表在IOP上。
NO.2
研究背景
利用TCSPC技术优良的光子通量灵敏度和高时间分辨率,激光雷达可以实现高空间分辨率、精确的测量精度和较强的抗干扰能力。长距离成像单光子激光雷达最初基于自由空间光学元件和盖革模式阵列探测器,为了提高探测视野和探测距离,近年来部分系统采用了光纤组件。例如,NASA演示了一种基于4x4光纤阵列的机载激光雷达。华东师范大学设计了光子计数激光测距系统,探测距离达到21公里。中国科学技术大学提出了一个1550 nm光子计数激光雷达,实现了45公里成像,但这些系统由自由空间光学元件和光纤元件组成,增加了系统的不稳定性。此外,大多数报道的单光子激光雷达系统的扫描机器都是反射镜,这限制了扫描视野。
在文章中,作者设计了一个工作在1064nm的激光雷达系统。设计了一种具有二维旋转平台的全光纤系统,采用亚像素扫描方法实现了宽视场、高分辨率的扫描。最后,通过自适应噪声阈值重建算法重建细节清晰的三维图像。
NO.3
创新点
1. 将成像仪按亚像素尺度移动,以捕获一系列低分辨率图像。然后,利用这些低分辨率的图像可以获得更高分辨率的图像。这些低分辨率图像之间的亚像素位移可以抑制频率混叠,这是超分辨率重建的本质。
2. 在扫描过程中,根据角度传感器的反馈实时校正波束指向。场景逐行扫描,方位轴的速度比俯仰轴快。在扫描整个场景后,使用重建算法实现三维成像。
NO.4
图文结果

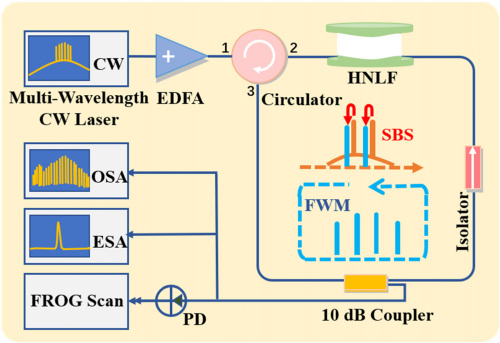
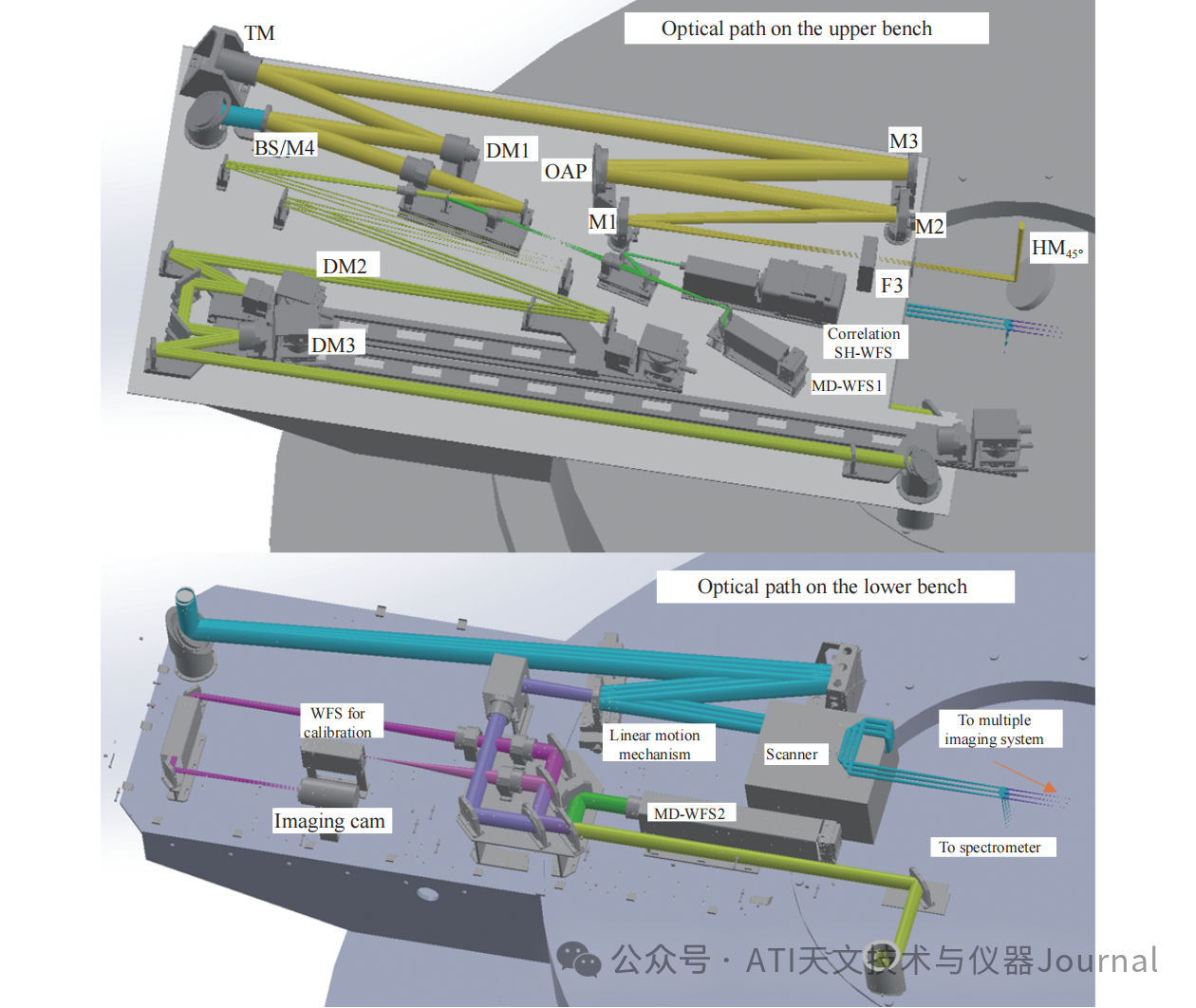
图1. 单光子激光雷达原理图

图2. 亚像素扫描法:(a)静态光学系统的视场,(b)亚像素扫描法将静态视场划分为小空间,(c)逐行扫描顺序。

图3 图像重建算法流程。
实验在能见度为7.98公里的白天进行。目标场景是一座建在距离发射器约2.1公里的山顶上被森林覆盖的塔架。我们的设备,包括光学系统、伺服、电气仪器和计算机,安装在一栋建筑中的移动机柜中。

图4 扫描角度分辨率为0.008°的山顶图像重建:(a)强度图像(b)最大强度回波的距离估计(c)多边形放大图像(d)二次强度回波的距离估计(e)三维重建点云。
图4(a)是强度图像,其中多边形框架结构的反射强度明显低于森林和多边形的圆形反射器。一个原因是框架的宽度小于发射激光的投影宽度,因此部分能量无法反射。图4(b)显示了最大强度的距离估计。结构距离激光雷达系统约2.13km,空间分辨率可计算为0.3m。图4(c)是(b)中多边形的放大图像;这里的框架结构很难区分。图4(d)中还导出了次级强度的射程信息。森林和多边形框架结构包含部分遮挡的对象,因此光在单个像素的不同范围内反射。根据距离和指向数据,计算每个像素编码的三个坐标值,重建三维点云。如图4(e)所示,x-y平面表示水平地面,z值表示距地面的高度。在正确的视野中,可以清楚地看到树冠和山顶上的塔架。
NO.5
总结
文章中介绍了一种波长为1064nm的全光纤单光子激光雷达,用于远距离成像。实验结果表明,在白天强太阳背景下能够顺利重建图像的三维点云。距离分辨率为38cm,距离为2.13km时的空间分辨率约为7.4cm,是系统分辨率的三倍。在未来的工作中,可以增加发射光束的数量以形成更宽的视野,从而在更短的时间内实现更大面积的成像。
文章链接:https://doi.org/10.1088/1742-6596/1983/1/012093
本文注明来源为其他媒体或网站的文/图等稿件均为转载,如涉及版权等问题,请作者在20个工作日之内联系我们,我们将协调给予处理。最终解释权归旭为光电所有。