Xenics短波红外相机应用在自适应光学系统的优势
这篇文章中,我们将介绍自适应光学以及重点介绍在波前传感中使用(短波)红外相机的优势。还重点介绍了在天文学、激光通信、生物成像显微镜和视网膜成像以及光学相干断层成像方面的一些关键应用。最后,总结了用于自适应光学应用的SWIR相机的关键性能参数
比利时Xenics红外相机

自适应光学介绍
1953年,H·W·巴布科克在《太平洋天文学会出版物》中写下了《补偿天文观测的可能性》[pha],[str]。他讨论了地球大气湍流对天文观测造成的严重限制,并提出了“自适应光学”(AO)作为一个改进天文成像的概念。这个概念,涉及到校正大气折射率变化引起的波前误差。尽管他的建议对美国军方来说很有意义,但花了大约20年的时间,技术才赶上理论,并在望远镜上安装了第一个AO系统。
相机和可变形反射镜的快速技术进步也使得自适应光学在其他应用领域的引入,如显微镜、视网膜成像和激光通信。
什么是自适应光学?
自适应光学(AO)是一种测量波前误差或畸变,并实时校正最终图像的技术。典型的AO系统由三个主要组件组成:
波前传感器(WFS)——用于测量误差或失真
控制系统——计算所需的校正并驱动校正装置
波前校正器——对畸变进行补偿
1,波前传感器
最常见的波前传感器称为Shack-Hartmann(SH-WFS)。这种简单的仪器于1971年首次被NASA和军事项目使用,它依赖于光的基本原理,即光波在均匀介质中沿直线传播,波前是垂直于局部传播方向的表面[Neal]。WFS使用透镜阵列将光分成多个小光束(子孔径)。然后,光点聚焦在二维成像仪或相机上。当波前畸变时,聚焦点移动,这是波前的特征。
2,控制系统
控制系统通常是运行控制算法软件的计算机。目标是确定聚焦点的位置,计算波前斜率,并通过积分计算波前重建,最后将此信息发送到波前校正器。
3,波前校正器
最常用的波前校正器技术是可变形反射镜(DM)。存在许多不同版本和类型的DM,选择标准由应用程序驱动。对于用于天文学中极端AO的MEMS(微电子机械系统)DM,执行器的数量可以从不到20个到4000多个不等。

图1:传统的自适应光学元件和配置。改编自C.Max,波士顿自适应光学中心
天文学中的AO以及在波前传感中使用红外的优势
频繁的动态大气湍流会导致随机的空间和时间波前失真,严重限制了捕获恒星和系外行星的高分辨率和精确图像的能力。对于天文学中的AO,我们必须明确区分波前传感器中使用的相机和用于观察的相机。
AO在天文学中的使用关键取决于提供对被大气扭曲的波前进行参考测量的能力。因此,波前感应是在称为自然引导星的参考星上进行的,如果这样的星可以在人们想要观察的物体附近找到的话。在某些情况下,如果对象本身足够亮并且具有锐利的光梯度,也可以使用它。波前传感测量可以在可见光中进行,以便在红外中观察,或者在红外本身中进行,以防参考星在可见光中不够亮。
目前以可见光传感器为基础的AO系统在天空覆盖方面受到严重限制。所以目前都会通过使用低噪声短波红外(或更好的可见光增强型SWIR)相机来观察更微弱的导星,并且红外波段(J、H、K)的恒星密度高于可见光。换句话说,在红外波段更容易找到自然导向星。具有更多红外通量的“晚型”恒星的更高表面密度使我们能够显著增加天空覆盖率。此外,在可见光中过于微弱的自参考红色物体也可用于波前传感。
波前计算必须快速完成(通常在1毫秒内),否则大气状态可能会发生变化。这就需要在波前传感中使用快速、灵敏的摄像头。必须使用较短的曝光时间来“冻结”大气湍流的影响。为了实时校正波前,必须使用高帧率和低延迟将校正信息发送到DM。此外,需要相对明亮的导星和高灵敏度探测器来保证波前传感器上有足够高的信噪比。

图2:用美洲狮短波红外相机作为科学成像相机在H波段(1500nm)观测北落师门恒星。
左图未校正,右图用AO校正。(图片来源:加州州立大学北岭分校任德清博士)
生物显微镜中的AO
体内成像在生物显微镜中至关重要——活组织与研究细胞过程更相关。然而,该应用中的限制因素是在不损坏组织的情况下可以使用的光量。AO可用于校正由组织中的散射引入的波前误差。SWIR波长和AO的组合对于深层组织体内成像和从生物样本中提取重要信息非常理想。
视网膜成像中的AO
视网膜成像用于在发病前检测眼部疾病,并开始早期治疗。眼部病变包括青光眼、糖尿病视网膜病变和年龄相关性黄斑变性。此外,领先的科学家认为,分辨单个视网膜细胞(约3μm)和通过微观脉管系统的眼部血流的能力将使他们能够监测患者健康状况的变化。人类视网膜是通往心脏的窗口,研究人员已经证明,视网膜血管损伤与冠心病、中风和糖尿病之间存在联系。
目前,由于眼睛本身(角膜和晶状体)的缺陷导致波前失真,人类视网膜的超高分辨率图像尚无法实现。使用AO进行眼部成像的主要技术有两种:共焦扫描激光眼科和光学相干断层扫描。对于这两种技术,AO可以显着提高分辨率。在OCT的情况下,通常使用中心波长约为840nm的超发光二极管。然而,将1300nm光与SWIR相机结合使用,将允许更好的穿透深度和更少的人体组织散射,从而显着提高所得图像的信噪比。
远程激光通信
对于地球观测卫星来说,成像传感器分辨率的要求更大,需要数据下行链路的数据速率比目前常规RF(射频)技术可行的数据速率要高得多。自由空间激光通信是一种无需电线或光纤即可传输数据的有前途的技术。
然而,当长距离(>1km)发送数据时,大气湍流会限制可实现的数据速率。光信号波前会因大气湍流引起的折射率变化而失真,云也会导致衰落或链路阻塞。AO可以校正激光脉冲的波前,从而提高可实现的数据速率并改善误码率(BER)。
特别是对于“近地飞行终端”(飞机下行链路),波长选择中,使用人眼安全的波段是地面站运营商的面临的关键问题。使用1550nm的自由空间激光器的优势是比800nm左右的波长对眼睛的安全性高约100倍。可以使用更大的激光功率。
此外,在1550nm处,该系统受来自天体、云层和地球反照率的背景光的影响也较小。这将减少跟踪传感器的致盲,并且可以使用具有更宽视野的传感器。此外,大气衰减在1550nm处非常低。所有这些都有助于将1550nm激光器与用于波前传感的高速SWIR相机结合使用。

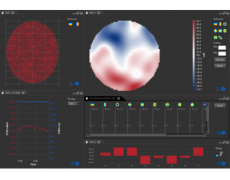
图3:InGaAs波前传感器(CheetahCL)的典型图像,以及两座建筑物之间400m链路的重建相位。
除了在自由空间激光通信中使用自适应光学器件外,Shack-Hartmann波前传感器还在激光束、LED和光学系统的计量和表征中得到应用。
波前传感器相机的选择
Xenics提供四种波长范围内的各种类型的SWIR相机:
- 500至1700nm(可见光增强InGaAs)
- 900至1700nm(标准InGaAs)
- 900至2350纳米(T2SL)
- 900至2500纳米(T2SL)
在选择用于波前传感的SWIR相机时,以下性能参数是关键:
- 必须使用具有低延迟的高速、高帧率相机,因为相机将用于控制回路中的WFS中进行实时校正。Xenics提供范围广泛的高速SWIR相机。XenicsCheetah相机是世界上最快的SWIR相机,在500至1700nm或900至1700nm波段的最大帧速率为1730fps,分辨率为640×512。
- 大多数应用都需要较短的曝光时间(<1ms)以“冻结”传输介质的状态。所有XenicsSWIR相机都允许灵活使用曝光时间设置。
- 低(读取)噪声传感器将有更好的信噪比。图像将受到读取噪声的限制,因为WFS的曝光时间总是很短,暗电流产生的散粒噪声不会起主导作用。
- 在某些应用(天文学)中,可见增强型SWIR相机有优势,因为它将在更宽的波长带中保持高灵敏度。
- 高分辨率传感器将允许精确测量空间波前失真。Xenics高速相机有320×256或640×512两种。大多数相机都提供灵活的窗口设置,以便以更高的帧速率捕获图像。
- 所有XenicsSWIR相机都没有配备斯特林冷却器,也没有冷停。斯特林冷却器会引起振动,并且在WFS中使用SWIR相机时,没有内部冷光阑也是一个优势:小于探测器尺寸的孔径会使波前传感的使用变得复杂。
结论
在本文中,我们讨论了AO在天文学、显微镜、视网膜成像和激光通信应用中的基本工作原理。已经强调了在这些应用中使用SWIR相机进行波前传感的好处。总结了SWIR相机在AO应用中的关键性能参数,并介绍了Xenics系列高速SWIR相机。