MRC-Systems主动激光束稳定系统
MRC-Systems主动激光束稳定
激光束的调整、稳定、定位和对准

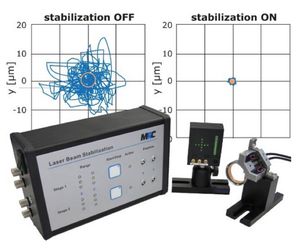
紧凑型激光稳束系统适用于各种需要精确和可靠的激光定位的应用场合。它稳定了光束的位置和方向。模拟实时闭环控制可对热漂移、振动或其他影响引起的所有类型的偏差进行无延迟补偿。它还可以有效地抵御高频干扰,如空气波动、振动或由移动光学引起的干扰。它能确保非常稳定的光束位置和角度。

产品优势
技术规格

不同型号的探测器和反射镜安装有单独的数据表
工作原理:
优化过的快速压电镜架被用来控制激光束。光束的理想位置和角度由一个或两个探测器(4 象限二极管或 PSD)定义。对于探测来说,一小部分的激光功率就足够了。例如,你可以使用通过高反射偏转镜的漏光。闭环控制器系统通过闭环实时控制不断确定激光束与其期望位置的偏差,并驱动快速压电致动器以使转向镜稳定激光束于期望位置。
一个典型的设置如下图所示,其中两个压电镜架和两个探测器被用来在四个维度(4D)上稳定光束。在这个设置中,第一级的压电镜1 和探测器1 用来控制光束在压电镜2 上持一个稳定的位置。然后第二级压电镜2 探测器 2 保证应用处正确的光束角度。

图1:激光束稳定原理
系统组件

图2、3和4(从左到右):带有压电驱动器的转向镜(版本P2S30),检测器
具有位置和强度显示(水平方向)、探测器(垂直方向)
控制器电子元件:系统的电子元件(控制器、放大器、电源)完全集成在一个紧凑的外壳中。它通过标准12V壁挂式电源供电。


图5:顶部面板上的键盘和接头
检测器的LED显示:检测器外壳的背面通过LED灯显示了每个连接检测器上的总功率。此外,检测器外壳上的LED十字显示当前激光束位置。如果激光束击中检测器中心,只有位置显示的绿色LED会亮起。在其他情况下,根据示例,黄色和红色LED也会亮起

图6:检查激光束击中探测器(橙色斑点)和相应的位置显示。
左侧图片显示在从外壳后侧到传感器区域的视图中
如果只有绿色和黄色的led在发光,传感器电子是在线性范围内,测量信号和位置之间存在直接 相关。如果一个红色LED也发光,由于4量子点的原理,这种相关性就不再可能。在psd的情况下 ,如果一个红色的LED在发光,光束可能会击中传感器的边缘。请检查光束的全直径是否击中了 传感器区域。
附加选项
采样和保持电路(“ADDA”):这个附加电路用于在激光关闭时间内固定激光束在最后位置。通过此附加功能,该控制器盒集成了将转向镜的位置固定在任意长的时间间隔内,无需控制信号或检测器上的激光强度。
操作模式:系统包含了附加S&H电路的采样和保持元件的自动控制。它通过采样定位检测器上的强度来自动识别激光的开和关状态。自动操作控制S&H元件以便在激光开启时定时存储信号,并在没有强度的间隔期间固定转向镜的位置。
产品应用
-
超短激光脉冲的稳定耦合:进入空心纤维或放大器模块。
-
补偿指向或波动:由于在具有关键定位需求的激光应用中的振动。
激光稳束紧凑型是一个模块化系统。最畅销的4轴系统由一个控制器、两个压电致动镜(如P2S30)和两个位置检测器(如Si-4QD)组成。由于模块化,可以实现不同的设置变体。这具有很大的优势,即该系统可以很容易地集成到现有的激光设置中。总是有合适的解决方案来定位组件。在下面我们描述了标准设置,它在大多数情况下都可提供最佳的稳定结果。

图7四轴系统的标准设置(交付中不包括激光器、反射镜和分光镜
图7显示了四轴系统的典型设置,其中两个阶段依次排列,每个阶段都有一个探测器和一个压电致动镜。探测器1放置在驱动镜2的后面。在那里它检测泄漏并确定激光在反射镜上的位置。第二阶段稳定角度。为此,可以将探测器2放置在光束路径中更远的镜片后面。照片中的分束器立方体仅用于更好的可视化效果。以下是更详细地解释这些组件在光束路径中彼此跟随的方式。
-
压电反射镜1:第一个压电式反射镜应在安装开始时尽可能早地放置。理想情况下,这是激光之后的第一面镜子。这样,实现了较长的控制路径,并且可以充分利用系统的潜力。
-
压电反射镜2:第二压电致动镜可以放置在光束路径的不同镜位。该组件应该放置在激光和靶材之间的大约一半位置,尽管准确位置并不重要。我们建议两个压电镜之间的距离为0.5米或更长。
-
探测器1:如图7所示,探测器1可以很容易地放置在压电反射镜2的后面。因为我们的探测器只需要很小一部分的光束,所以HR镜后面的泄漏通常就足够了。重要的是,所使用的镜子有一个抛光的背面,以便光束可以畅通无阻地击中探测器。
(这确保了探测器1尽可能靠近被驱动的反射镜2。这样,它就可以确定激光器在该反射镜上的位置。如果光束直径不大于约8 mm,则始终可以使用此设置,因为标准探测器的传感器面积为10×10 mm2,并且压电致动镜安装中用于光束传输的孔径有限。P2S30镜架的孔径为12毫米。对于较大的光束直径,可以通过使用分束器或将探测器放在另一面镜子后面来轻松修改设置。) -
探测器2:应放置在尽可能靠近目标的位置。在许多情况下,它可以放在设置中的最后一个镜像后面。理想情况下,到探测器1的距离也应为0.5米或更远。
我们MRC-Systems用于激光束实时稳定、对准、定位和调整的主动激光束稳定系统。我们的系统极其精确、快速且非常稳定。不需要用户交互。它们配备了友好的操作和安全功能,可快速集成到不同的激光设置中。
借助我们的光束稳定系统,激光器始终稳定在所需的目标位置和光束方向。请随时与我们联系。我们期待协助您进行选择、规划和整合。